


Az ABB ĂŠs a Texas Childrenâs gyermekkĂłrhĂĄz ĂĄttĂśrĂŠst jelentĹ automatizĂĄlĂĄsi megoldĂĄst fejlesztett ki
2024. augusztus 19.

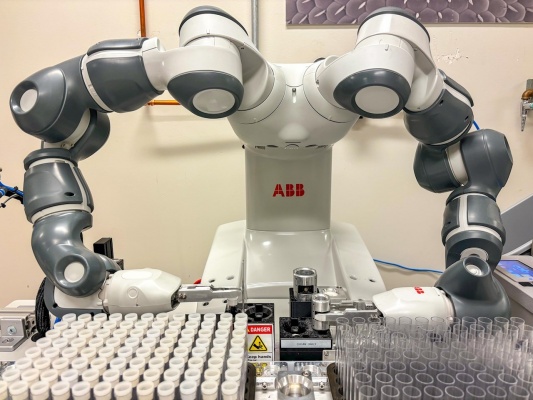
Az ABB Robotics és az Egyesült Államok egyik legnagyobb gyermekkórháza, a Texas Children's Hospital égisze alatt mĹąködĹ Jan and Dan Duncan Neurológiai Kutatóintézet (Duncan NRI) az innovatív, automatizált Drosophila melanogastert (ecetmuslica) áthelyezĹ munkaállomás kifejlesztésével áttörést ért el az orvosi kutatásban. Az ABB YuMi nevĹą együttmĹąködĹ robotjára (azaz kobotjára) épülĹ automatizálási megoldás hatékonyan segíti a betegségek, köztük az Alzheimer-, a Huntington- és a Parkinson-kór tanulmányozását.
• A világ elsĹ megoldása az ecetmuslicák aneszteziológia nélküli áthelyezésének automatizálására, az ABB YuMi kobotjának használatával.
• A 20%-os idĹmegtakarítás lehetĹvé teszi, hogy a kutatók a kritikus feladatokra összpontosíthassanak a neurológiai betegségek, például az Alzheimer-kór tanulmányozása és kezelése terén.
Ez az elsĹ olyan automatizálási megoldás, amely nem igényli, hogy a muslicákat a kémcsĹbe történĹ áttelepítésük elĹtt anesztézissel, például szén-dioxiddal mozgásképtelenné tegyék. Ez a korábbi automatizálási megoldásoknál hosszadalmas, munkaigényes folyamat volt, ami negatívan befolyásolhatja a muslicák viselkedését és potenciálisan a vizsgálati eredmények pontosságát is.
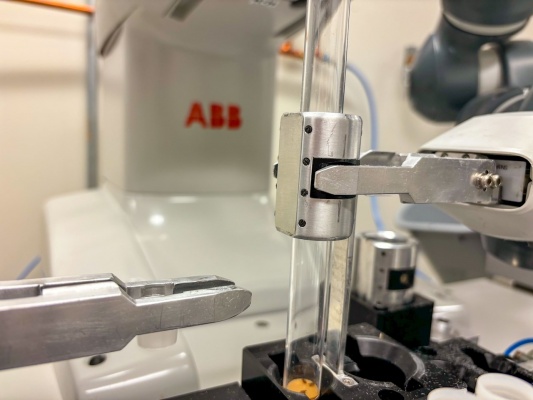
Az ABB YuMi kobotja ugyanazokat a mozdulatokat végzi, mint a kutatók, finoman megkocogtatja a kémcsövet, és a muslicákat áttelepíti az egyik kémcsĹbĹl a másikba, így lehetĹvé teszi a tudósok számára, hogy a kulcsfontosságú feladatokra, például az új útvonalak felfedezésére és az új gyógyszerek hatékonyságának tesztelésére koncentráljanak a neurológiai rendellenességek gyógymódjainak kutatása során. A megoldásnak köszönhetĹen nem kell a muslicákat áttelepítés elĹtt elaltatni, ami javítja a kutatási eredmények pontosságát, és felgyorsítja az áthelyezési folyamatot.
„Az évek során jelentĹs fejlĹdést tapasztaltunk a laboratóriumi automatizálás terén, azonban néhány kulcsfontosságú feladatot még mindig kézzel végeznek, ami hatással lehet a kutatási eredményekre” – mondta Jose-Manuel Collados, az ABB Service Robotics Product Line vezetĹje. „Az ABB YuMi kobotjának karjai önállóan, de összehangoltan dolgoznak, ami lehetĹvé teszi az élĹ muslicák kémcsövek közötti áttelepítéséhez kapcsolódó összetett munkafolyamat automatizálását.”
A Drosophila melanogaster, közismert nevén az ecetmuslica, széles körben használatos a biológia különbözĹ területeinek kutatásában, beleértve a genetikát, a fejlĹdést és a viselkedést. Az ecetmuslica és az ember számos hasonló genetikai és fejlĹdési markerrel rendelkezik, ezért világszerte használják az emberi neurológiai betegségek vizsgálatában.
A muslicák rutinszerĹą tenyésztési folyamata során a kutatók úgy táplálják a rovarokat, hogy azokat 30 naponként friss élelmet tartalmazó fiolákba telepítik át. Egy átlagos laboratóriumban körülbelül 20 000 fiolában tenyésztenek muslicákat, és a kutatók a munkanap körülbelül 20 százalékát azzal töltik, hogy a muslicákat "áthelyezik", azaz a muslicákat tartalmazó kémcsövet egy friss élelmet tartalmazó másik fölé helyezik, megkocogtatják, hogy a muslicák átessenek. A folyamat automatizálására tett eddigi kísérletek úgy zajlottak, hogy áthelyezéskor a muslicák kikerültek a fiolákból, ami miatt a rovarokat nyugtatóval tették mozgásképtelenné.
Az ABB Robotics mérnökei a Duncan NRI kutatóival együttmĹąködve megterveztek és megépítettek egy muslicaáttelepítĹ munkaállomást, amelynek fĹbb elemeit a YuMi kobot, az áttelepítéshez szükséges fiolákat tartó asztal, egy vonalkód- és címkézĹ egység, valamint egy hulladékcsúszda alkotják.

„Ez az orvosbiológiai kutatást felgyorsító innovatív megoldás az ABB Robotics-szal folytatott több mint két éve tartó szoros együttmĹąködésünk eredménye” – mondta Dr. Juan Botas, a Baylor College of Medicine Molekuláris és Humángenetikai Tanszékének, valamint a Molekuláris és Sejtbiológiai Tanszékének professzora, aki a Duncan NRI vezetĹ kutatója. „Az általam és Dr. Ismael-Al Ramahi által, aki a Baylor College of Medicine adjunktusa, s egyben a Duncan NRI kutatója, vezetett DNRI kutatóinak az ecetmuslica-élettani kutatások, valamint az automatizált, nagy volumenĹą kísérletek terén szerzett szakmai tapasztalatainak ötvözése az ABB mérnökeinek automatizálási szakértelmével lehetĹvé tette számunkra egy kobot-alapú megoldás megtervezését, amely csökkenti az idĹigényt, kiküszöböli a muslicatörzzsekkel kapcsolatos veszteséget, és lehetĹvé teszi több kísérlet párhuzamos elvégzését.”
Az ABB YuMi kobotja kezeli a muslicák áthelyezésének teljes folyamatát, amely 10 elĹre beprogramozott lépés gyors egymásutánban történĹ végrehajtásából áll. Az emberekhez hasonlóan a YuMi felemeli az élĹ muslicákat tartalmazó fiolát, kinyitja a védĹ cellulóz-acetát dugót, egy másik, friss élelemmel teli fölé helyezi, megkocogtatja a muslicák átültetéséhez, lezárja, felcímkézi az új kémcsövet, beszkenneli az adatait, majd végül kartonállványba rakja. A robot ezután kidobja a régi táplálékot tartalmazó fiolákat, hogy megelĹzze a keresztszennyezĹdést.

A megoldásba integrált jelentĹs mĹąszaki funkciónak tekinthetĹ a vonalkódok olvasásának és a címkék nyomtatásának képessége, amelyeket az átültetés során a törzs és a genotípus információival ellátva helyeznek fel a fiolákra. Ez a funkció biztosítja a Drosophila törzsek pontos nyomon követését és kezelését. A robot fejlett érzékelési technológiái lehetĹvé teszik a fiolák pontos elhelyezését a szabványos kartonállványokban, aminek köszönhetĹen a kutatók a meglévĹ fiolaállványokat újból felhasználhatják, ezáltal csökkentve a mĹąködési költségeket.
Ennél is fontosabb, hogy a robotot úgy tervezték, hogy együttmĹąködĹ és biztonságos legyen az emberi interakció szempontjából. MozgásérzékelĹ karjai érzékelik a közelben lévĹ embereket vagy tárgyakat, és vészhelyzet esetén – a balesetek elkerülése érdekében – azonnal megállítják a folyamatban lévĹ mĹąveletet, így garantálva a biztonságos, együttmĹąködĹ munkateret.
KapcsolĂłdĂł cikkek
- A Mahindra az ABB PixelPaint rendszerĂŠt vĂĄlasztotta a prĂŠmium festĂŠsi lehetĹsĂŠgek kivitelezĂŠsĂŠhez
- A felĂşjĂtott ABB-robotok ragyogĂł kilĂĄtĂĄsokat kĂnĂĄlnak a nĂŠmet motorkerĂŠkpĂĄr-gyĂĄrtĂłnak
- Az ABB Robotics ĂŠs a koreai Pulmuone az MI-alapĂş automatizĂĄlĂĄs alkalmazĂĄsĂĄnak lehetĹsĂŠgeit vizsgĂĄlja
- Az ABB felvĂĄsĂĄrolja a Sevensense-t
- Az ABB megerĹsĂti vezetĹ szerepĂŠt a kĂśvetkezĹ generĂĄciĂłs MI-alapĂş mobil robotika terĂźletĂŠn
- Az ABB intelligens robotikai automatizĂĄlĂĄsi megoldĂĄsai tĂĄmogatjĂĄk a Volvo Cars fenntarthatĂłsĂĄgi cĂŠljait
- Az ABB tĂśbb mint 1300 robotot szĂĄllĂt a Volvo Carsnak
- KarĂĄcsonyi sĂźtit kĂŠszĂt a GoFa, az ABB egyĂźttmĹąkĂśdĹ robotja
- A robotok pontos ĂŠs alkalmazkodĂłkĂŠpes elektronikai gyĂĄrtĂĄst biztosĂtanak
- A vilĂĄg legtĂĄvolabbrĂłl vezĂŠrelt robotja automatizĂĄlja AmazĂłnia ĂşjraerdĹsĂtĂŠsi projektjĂŠt